Exoskeletons for Augmenting Human Performance
As an emerging field with multiple avenues of application, exoskeleton technology holds great promise in restoring and augmenting human ability. IHMC has over a decade of experience researching mobility-restoring exoskeletons showcased by the 2016 and 2020 Cybathlon competitions and Toyota Mobility Foundation Mobility Unlimited Challenge with the Mina and Quix devices.
More recently, IHMC has developed a new ability-augmenting exoskeleton for use in hazardous radioactive waste cleanup. This device is designed to offload the weight of a heavy air tank and various pieces of personal protective equipment from users to prevent long-term biomechanical injury.
Eva Exoskeleton
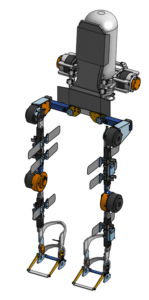
Eva is a powered lower-body exoskeleton that is being developed by IHMC to offload the weight of heavy personal-protective equipment from users’ bodies to the ground while also augmenting user motion. The suit is designed to assist throughout the users’ natural range of motion so as to not restrict movements.
The suit provides net positive power to hip and knee flexion/extension as well as ankle plantarflexion while passively allowing motion in other degrees of freedom of the hips. The hips and knees are driven by collocated brushless DC motor actuators, while the ankles are driven by cables attached to actuators located in the backpack. The exoskeleton is built around a common harness used for 60-minute SCBA tanks, and the tank can be removed and attached easily. Eva is also designed to be modular, meaning that the linkages connecting each of the joints can be swapped to fit different users. In order to perform various levels of control, the exoskeleton will be instrumented with various mechanical sensors such as encoders, inertial measurement units (IMUs), and load cells.
While designed for its primary goal of weight compensation, Eva also provides a promising testbed for novel exoskeleton controls and assistance optimization. The team is continuously iterating on the device through improvements to exoskeleton weight, development of custom actuators, and implementation of custom electronics.

Research Projects:
- Humanoid Robots as Human Avatars
- Nadia Humanoid
- Exoskeleton for Improving Mobility
- Cybathlon 2020
- Quadrupedal Locomotion
- Open Source Initiative
- Exoskeletons for Augmenting Human Performance
Past Projects:
- DARPA Robotics Challenge
- M2V2 Humanoid
- Learning Locomotion
- X1 Mina Exoskeleton
- Cybathlon 2016
- The Grasshopper
- FastRunner
IHMC Research Team:
- Dr. Robert Griffin – Primary Investigator
- Dr. Gwen Bryan – Primary Investigator
- Jared Li – Project Manager
- Vishnu Aishwaryan Subra Mani – Mechanical Engineer
- Nicole Esposito – Mechanical Engineer
- Owen Winship – Controls Engineer
- Stefan Fasano – Controls Engineer
- Alexis Maslyczyk – Electrical Engineer
- Adam Bruce – Virtual Reality Software Engineer
- Bridget Longo – 3D Modeling Artist