Quadrupedal Locomotion
Quadrupedal robots have the potential to go where traditional robotic platforms that use wheels or treads cannot. This level of mobility is critical for robots that are developed to work as part of a human team or squad. Beyond just the mobility aspect, though, the robots must be capable of both maintaining pace with their human counterparts, and functioning for an extended period of time. If possible, these robots can then be used for countless tasks such as reconnaissance and load carrying, assisting their human team members as they go about their work.
Operational Quadrupedal Locomotion
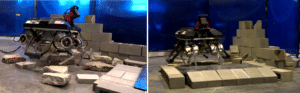
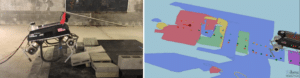
As part of the Army Research Lab’s (ARL) Robotics Collaborative Technology Alliance (RCTA), we developed novel planning and control algorithms for quadrupedal locomotion. The goal of our project was to equip the robot LLAMA, developed by NASA JPL, with the skills needed to move at operational tempo over difficult terrain to keep up with a human squad. This requires innovative perception, planning, and control techniques to make the robot both precise in execution for navigating technical obstacles and robust enough to reject disturbances and recover from unknown errors. The LLAMA robot is shown below using onboard Lidar to sense the environment and plan footholds over rough terrain.
Dynamic Quadrupedal Locomotion
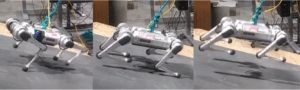
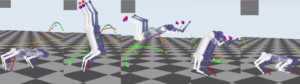
We are also researching algorithms for enabling dynamic quadrupedal motions. Through a collaboration with the MIT Biomimetic Robotics Lab we are developing these algorithms on the Mini Cheetah robot. The pictures below show the Mini Cheetah executing complex motions by performing online optimization using Model Predictive Control.
Research Projects:
- Humanoid Robots as Human Avatars
- Nadia Humanoid
- Exoskeleton for Improving Mobility
- Cybathlon 2020
- Quadrupedal Locomotion
- Open Source Initiative
- Exoskeletons for Augmenting Human Performance
Past Projects:
- DARPA Robotics Challenge
- M2V2 Humanoid
- Learning Locomotion
- X1 Mina Exoskeleton
- Cybathlon 2016
- The Grasshopper
- FastRunner