M2V2 Humanoid
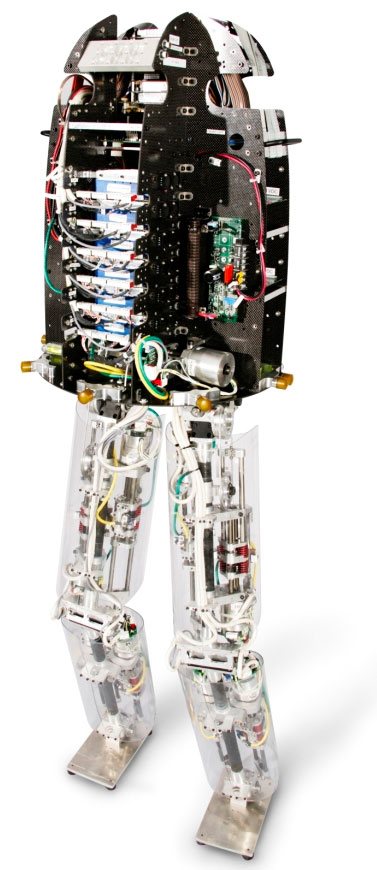
One of our main goals is the development of humanoid robots for urban environments. One of our early effort towards this was M2V2, where several organizations and many individuals had a significant influence on the work and/or are currently collaborating with us. These include:
- IHMC: Algorithm development, particularly disturbance recovery, using the concept of Capture Points to determine the best stepping location for recovery. Also mechanical design, prototyping, assembly, and debugging.
- MIT Leg Laboratory: M2V2 is based on the robot M2. This project was led by Dr. Gill Pratt. Dan Paluska was the chief mechanical designer. David Robinson designed and anlyzed the actuators. Other contributors include Allen Parseghian, Jerry Pratt, Chee-Meng Chew, John Hu, Andreas Hofmann, Mike Wessler, Pete Dilworth, Ben Krupp, and Chris Morse. Both M2 and M2V2 utilize Series Elastic Actuators, which were invented by Gill Pratt and Matthew Williamson, U.S.patent 5650704.
- Yobotics, Inc.: Mechanical design and prototyping lead.
- Ben Krupp led the overall mechanical design effort.
- Bucknell University: New foot design, vision head design, and overall mechanical design analysis and improvements.
- Keith Buffinton is the PI on our joint ONR project and oversees the Bucknell student design team.
- Steve Shooter spent a sabattical at IHMC assisting with robot design and contruction and design methodologies.
- Chris Shake spent a 3 month internship at IHMC and assisted with the contruction and implemented some of the key software.
- Daniel Snyder and Matt Kandler spent the summer of 2009 at IHMC designing and testing a vision head for the robot.
- Several student design projects are focussing on developing a better force-sensing foot and vision head.
- Delft University Robotics Lab: Algorithm design, robot construction and debugging.
- Niels van Nieuwenhausen and Twan Koolen each spent 3 month internships working on the robot, assisting with construction and implementing some key software.
- Riewert van Doesburgh spent fall term 2009 as an intern working on the robot, assisting in the control of push recovery while walking with limited available footholds.
- University of Michigan: Algorithm design.
- We built a copy of the robot for Art Kuo’s lab.
- John Rebula implemented some key software and we hope at least part of his PhD thesis will be based on the robot.
- MIT Robot Locomotion Group: Some of the ideas on Capture Points and humanoid stability analysis came together through discussions with Russ Tedrake.
- Honda Research Institute: Much of the work on Push Recovery was done as a collaboration with Ambarish Goswami at the Honda Reseach Institute in Mountain View, CA.
Publications on Humanoids and Bipedal Walking
Jerry Pratt, Ben Krupp, Design of a bipedal walking robot, Proceedings of the 2008 SPIE, Volume 6962, 69621F
John Rebula, Fabian Canas, Jerry Pratt, Ambarish Goswami, Learning Capture Points for Humanoid Push Recovery, Proceedings of the 2007 IEEE-RAS International Conference on Humanoid Robots, November 29-December 1, 2006, Pittsburgh, Pennsylvania.
Jerry Pratt, Sergey Drakunov, 2007. Derivation and Application of a Conserved Orbital Energy for the Inverted Pendulum Bipedal Walking Model. Proceedings of the 2007 IEEE International Conference on Robotics and Automation (ICRA ’07), Rome, Italy, pp. 4653-4660. (Please note that there is a typo. The x_dot_0 in the RHS of Equations 48 and 51 should be squared. Thanks to Martin Andrews for pointing out this error.)
Jerry Pratt, John Carff, Sergey Drakunov, and Ambarish Goswami, 2006. Capture Point: A Step toward Humanoid Push Recovery. Proceedings of the 2006 IEEE-RAS International Conference on Humanoid Robots, December 4-6, 2006, Genoa, Italy, pp. 200-207.
Jerry E. Pratt and Russ Tedrake, 2006. Velocity Based Stability Margins for Fast Bipedal Walking, Presented at the First Ruperto Carola Symposium in the International Science Forum of the University of Heidelberg entitled “Fast Motions in Biomechanics and Robots“, September 7-9, 2005, Heidelberg Germany.
Jerry E. Pratt and Benjamin T. Krupp, 2004. Series Elastic Actuators for Legged Robots. Proceedings of the 2004 SPIE.
D. J. Paluska and J. E. Pratt, 2003. Bipedal Walking Robots in Biomimetic Robotics, Brezeal, C. and Yoseph Bar-Cohen, Ed., SPIE Press, 228-252.
Jerry Pratt. 2002. Bipedal Walking Robots: Advancing the Science through Killer Applications, Replication and Validation, Standards and Common Platforms, and Competition. Proceedings of the 2002 FIRA Robot World Congress, Seoul, Korea, May 26-29, 2002. pp. 111-114.
Jerry Pratt, Ben Krupp, and Chris Morse, 2002. Series elastic actuators for high fidelity force control. Industrial Robot Journal, Vol. 29, No. 3, pp. 234-241
Jerry E. Pratt, Chee-Meng Chew, Ann Torres, Peter Dilworth, Gill Pratt, 2001. Virtual Model Control: An Intuitive Approach for Bipedal Locomotion. International Journal of Robotics Research, 20:(2), 129-143.
Chee-Meng Chew, Jerry E. Pratt, Gill A. Pratt. 1999. Blind Walking of a Planar Bipedal Robot on Sloped Terrain. Proceedings of IEEE International Conference on Robotics and Automation (ICRA ’99), Detroit, Michigan.
Pratt, Jerry 2000. Exploiting Inherent Robustness and Natural Dynamics in the Control of Bipedal Walking Robots. Ph.D. Thesis, Computer Science Department, Massachusetts Institute of Technology, Cambridge, Massachusetts, 2000
Pratt, Jerry, Pratt, Gill 1999. Exploiting Natural Dynamics in the Control of a 3D Bipedal Walking Simulation. Proceedings of the International Conference on Climbing and Walking Robots (CLAWAR99), Portsmouth, UK, September 1999
David W. Robinson, Jerry E. Pratt, Daniel J. Paluska, Gill A. Pratt. 1999. Series Elastic Actuator Development for a Biomimetic Walking Robot. IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Sept. 19-22, 1999. Atlanta, GA.
Pratt, J., Pratt, G. 1998. Exploiting Natural Dynamics in the Control of a Planar Bipedal Walking Robot. Proceedings of the Thirty-Sixth Annual Allerton Conference on Communication, Control, and Computing, Monticello, IL, September 1998.
Pratt, J., Pratt, G. 1998. Intuitive Control of a Planar Bipedal Walking Robot Proceedings of the IEEE International Conference on Robotics and Automation (ICRA ’98), Leuven, Belgium 1998.
Pratt, J., Dilworth, P., Pratt, G. 1997. Virtual Model Control of a Bipedal Walking Robot Proceedings of the IEEE International Conference on Robotics and Automations (ICRA ’97), Albuquerque, NM. 1997.
Pratt, J. Virtual Model Control of a Biped Walking Robot , M.Eng. Thesis, Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology, Cambridge, Massachusetts, 1995.
Pratt, J., Torres, A., Dilworth, P., Pratt, G. 1996. Virtual Actuator Control Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS ’96), Osaka, Japan.
Pratt, Williamson, Dilworth, Pratt, Ulland, Wright 1995. Stiffness Isn’t Everything Proceedings of ISER ’95, Stanford CA.
Related Publications on Monopods, Quadrupeds and Exoskeletons
Hian Kai Kwa, Jerryll H. Noorden, Matthew Missel, Travis Craig, Jerry E. Pratt, Peter D. Neuhaus, Development of the IHMC Mobility Assist Exoskeleton, Proceedings of the 2009 IEEE International Conference on Robotics and Automation, (ICRA ’09), Kobe, Japan.
John Rebula, Peter Neuhaus, Brian Bonnlander, Matthew Johnson, Jerry Pratt, A Controller for the LittleDog Quadruped Walking on Rough Terrain, Proceedings of the 2007 IEEE International Conference on Robotics and Automation, (ICRA ’07), Rome, Italy, pp. 1467-1473.
Benjamin T. Krupp, Jerry E. Pratt, A power autonomous monopedal robot, Proceedings of the 2006 SPIE, Volume 6201, 620112
Jerry E. Pratt, Benjamin T. Krupp, Christopher J. Morse, and Steven H. Collins, 2004. The RoboKnee: An Exoskeleton for Enhancing Strength and Endurance During Walking. Proceedings of the 2004 IEEE International Conference on Robotics and Automation (ICRA ’04), New Orleans, LA, 2430-2435.
Peter D. Neuhaus, Michael O’Sullivan, David Eaton, John Carff, and Jerry E. Pratt, 2004. Concept Designs for Underwater Swimming Exoskeletons. Proceedings of the 2004 IEEE International Conference on Robotics and Automation (ICRA ’04), New Orleans, LA, 4893-4898.
Research Projects:
- Humanoid Robots as Human Avatars
- Nadia Humanoid
- Exoskeleton for Improving Mobility
- Cybathlon 2020
- Quadrupedal Locomotion
- Open Source Initiative
Past Projects:
- DARPA Robotics Challenge
- M2V2 Humanoid
- Learning Locomotion
- X1 Mina Exoskeleton
- Cybathlon 2016
- The Grasshopper
- FastRunner